知能ロボティクス

本田 康平
HONDA Kohei
2025年度採用
名古屋大学
大学院工学研究科
助教
専門分野
キーワード
自律移動ロボット
自動運転
運動計画
環境認識
ロボット学習
所属学協会
計測自動制御学会
米国電気電子学会
主な研究内容
自動車やロボットといった移動体の自律移動知能化に関する研究に取り組んでいます。特に、自律移動制御理論と機械学習の融合によるアプローチを重視しており、たとえばモデル予測制御器の自動生成、確率推論型モデル予測制御と強化学習・生成モデルの統合、さらには位置推定や意思決定アルゴリズムへの機械学習モデルの組み込みなどに取り組んでいます。
私は、「移動」とはつまるところ、「環境をいかに認知・表現し、その環境表現の中で自らの行動を最適化できるか」に尽きると考えています。人間は、目という非常に安価なセンサーを用いて環境を理解し、環境とのインタラクションを高度に考慮しながら、状況に応じて柔軟かつ高速に移動することができます。このような人間レベルの自律移動は、現在の技術では未だ実現されていません。
こうした背景から、私は環境表現と行動最適化の観点から研究を進めており、最終的には人間のような「安い、賢い、速い」自律移動の実現を目指しています。これらの技術は、都市交通、倉庫内物流、屋内外の配送ロボットなど多様な応用可能性を持っており、実世界における安全・高速かつ低コストな自律移動の社会実装につながると考えています。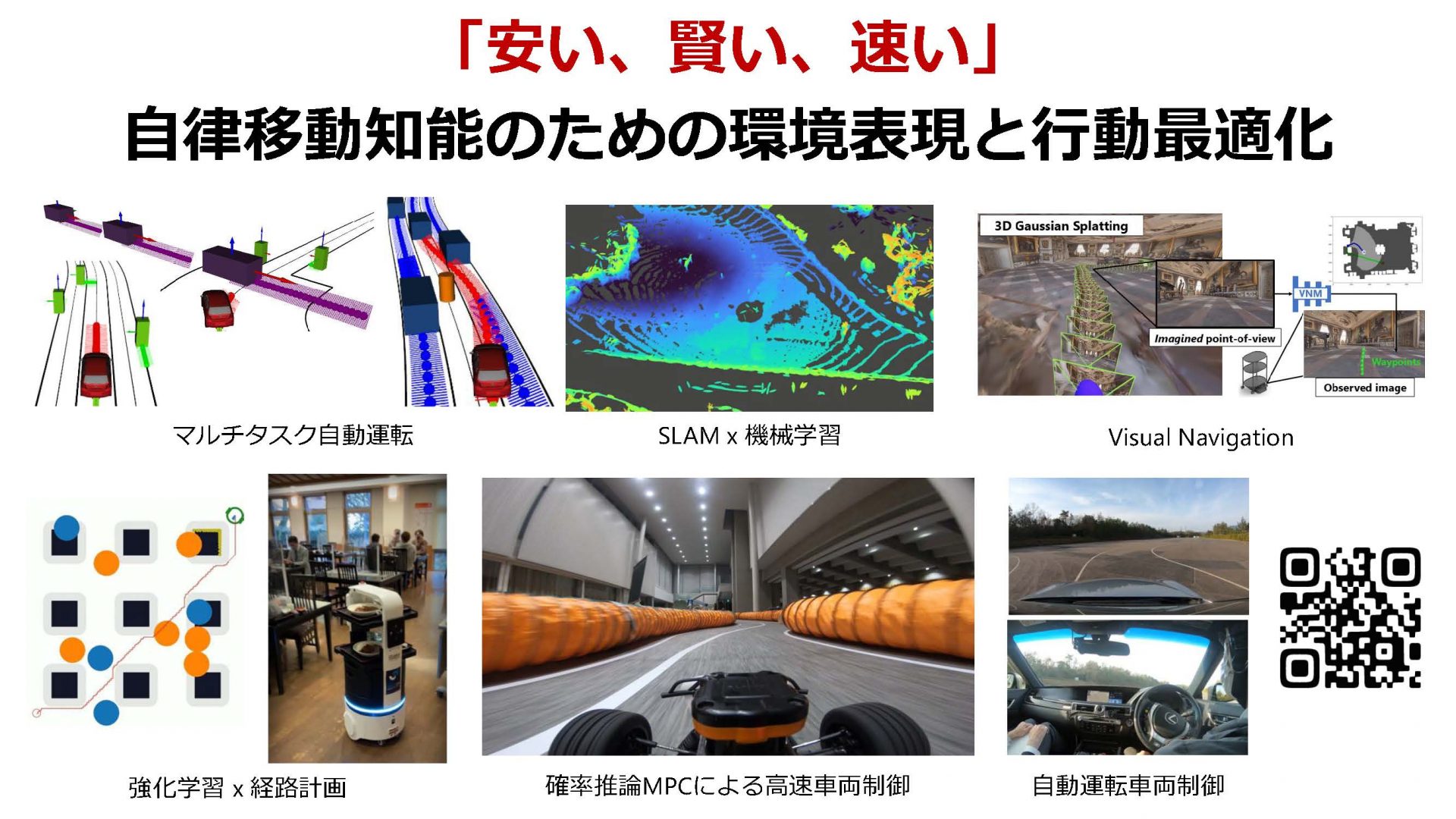
![]()
![]()
![]()
![]()
![]()
論文
Kohei Honda, Kenji Koide, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno, “Generalized LOAM: LiDAR Odometry Estimation with Trainable Local Geometric Features”, IEEE Robotics and Automation Letters (RA-L), Vol. 7, No. 4, pp. 12459–12466, 2022.
Kohei Honda, Naoki Akai, Kosuke Suzuki, Mizuho Aoki, Hirotaka Hosogaya, Hiroyuki Okuda, and Tatsuya Suzuki, “Stein Variational Guided Model Predictive Path Integral Control: Proposal and Experiments with Fast Maneuvering Vehicles”, IEEE International Conference on Robotics and Automation (ICRA), pp. 7020–7026, 2024.
研究紹介
Researchmap https://researchmap.jp/kohonda
個人HP https://kohonda.github.io/
本事業を通じて解決を目指す世界的課題
次世代ロボットのための環境適応可能な視覚型自律移動知能の開発
人間は視覚情報のみに基づき、様々な環境で効率的な移動を達成する。たとえその動作環境が、人混みや狭所空間、あるいは高速レースのような特殊な環境であっても、試行錯誤や過去経験から各々の環境に特化した移動を会得することができる。しかしながら、現時点での自律移動ロボットは3次元点群を用いた動作環境の環境観測と事前に作成した精緻な環境モデルに依存している。本研究は、人間と同様に、視覚(カメラ)情報のみを環境観測に用い、事前学習した基盤方策を実環境で強化学習をすることによって様々な動作環境に適応可能な自律移動人工知能の創出を目指す。
インタビュー
インタビューはありません
関連ニュース
関連ニュースはありません