Robotics and Intelligent Systems

HONDA Kohei
Starting year 2025
Nagoya University
Graduate School of Engineering
Research fields
Research Interests
Autonomous Mobile Robotics
Autonomous Driving
Motion Planning and Control
Environmental Perception
Robot Learning
Professional Memberships
The Society of Instrument and Control Engineers
Institute of Electrical and Electronics Engineers
Main research topics
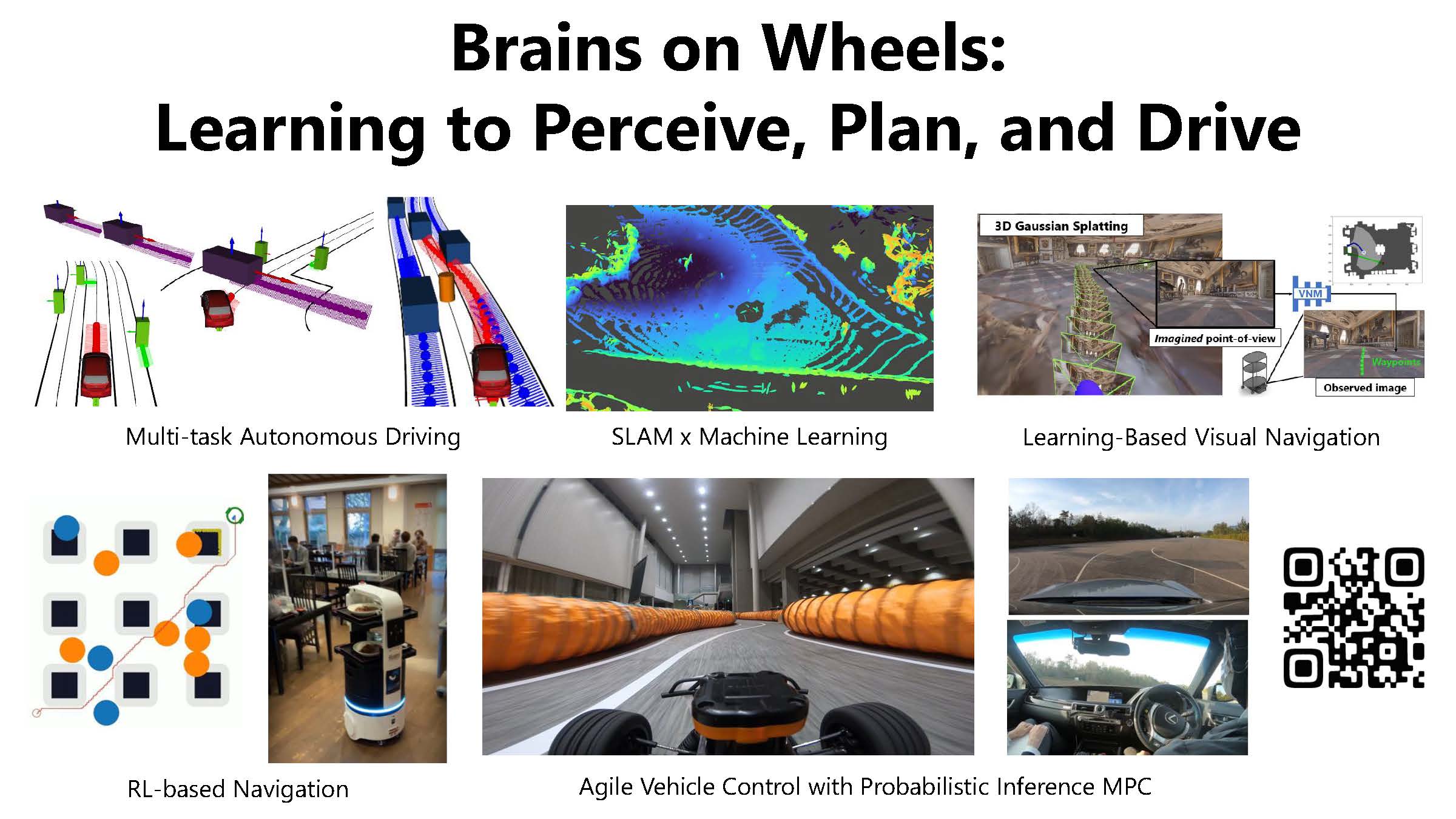
I am researching the intelligent autonomous navigation of mobile systems, such as autonomous vehicles and robots. I focus on integrating autonomous motion control theory with machine learning. My work includes the automatic generation of model predictive controllers, the fusion of probabilistic inference-based model predictive control with reinforcement learning and generative models, and the incorporation of learning-based models into localization and decision-making algorithms.
I believe that mobility ultimately comes down to a single question: How effectively can an agent perceive and represent its environment, and optimize its behavior within that representation? Humans, for instance, understand their surroundings using vision—a remarkably inexpensive sensor—and move swiftly and flexibly by deeply considering interactions with their environment. Such human-level autonomy in navigation has yet to be achieved by current technologies.
With this background, I am approaching the problem from the perspectives of environment representation and behavior optimization, aiming to realize autonomous systems that are as affordable, intelligent, and agile as humans. These technologies have broad applications in areas such as urban transportation, warehouse logistics, and indoor-outdoor delivery robots, and I believe they will be key to achieving safe, high-speed, and low-cost autonomous mobility in the real world.
![]()



Representative papers
Kohei Honda, Kenji Koide, Masashi Yokozuka, Shuji Oishi, and Atsuhiko Banno, “Generalized LOAM: LiDAR Odometry Estimation with Trainable Local Geometric Features”, IEEE Robotics and Automation Letters (RA-L), Vol. 7, No. 4, pp. 12459–12466, 2022.
Kohei Honda, Naoki Akai, Kosuke Suzuki, Mizuho Aoki, Hirotaka Hosogaya, Hiroyuki Okuda, and Tatsuya Suzuki, “Stein Variational Guided Model Predictive Path Integral Control: Proposal and Experiments with Fast Maneuvering Vehicles”, IEEE International Conference on Robotics and Automation (ICRA), pp. 7020–7026, 2024.
Research URL
Researchmap Kohei Honda – My portal – researchmap
Personal Web Site https://kohonda.github.io/
Global issues to be solved through this project
Environmentally Adaptive Visual Autonomous Navigation for Next-Generation Robotics
Humans can achieve efficient mobility in various environments based solely on visual information. Even in challenging settings such as crowded areas, narrow spaces, or high-speed racing scenarios, they can acquire environment-specific navigation skills through trial and error and experience. In contrast, current autonomous mobile robots rely on extensive environmental observations using three-dimensional point clouds and on carefully built environmental models. This research aims to develop an autonomous mobile artificial intelligence that, like humans, utilizes only visual (camera) information to observe its surroundings and adapts to various navigation environments through reinforcement learning in real-world settings.
Interview
No interview